A new AI constraint solver for Python: OptaPy

Christopher Chianelli

OptaPlanner developer
Python developers can now solve AI planning problems (such as the vehicle routing problem and employee rostering) with OptaPy. Let me show you how to use OptaPy and a bit of plain Python code to tackle a typical mathematical optimization problem: generate a better school timetable schedule for teachers and students. OptaPy is an open source project. It’s available in PyPI and is usable from a normal Python installation. Internally, OptaPy uses OptaPlanner, so it does need a JDK installed. Currently, it’s significantly slower than using OptaPlanner directly from Java (or Kotlin for that matter), but it works and we’re investigating ways to bridge the performance gap. Let’s optimize that school timetable in pure Python. Feel free to follow along in the OptaPy Jupyter notebook.
Prerequisites
-
JDK 11 or later is installed with the environment variable JAVA_HOME configured to the JDK installation directory.
Setup
-
Create a new Python virtual environment.
python3 -m venv optapy-env -
Activate the Python virtual environment.
source optapy-env/bin/activate -
Use pip to install OptaPy.
python3 -m pip install optapy
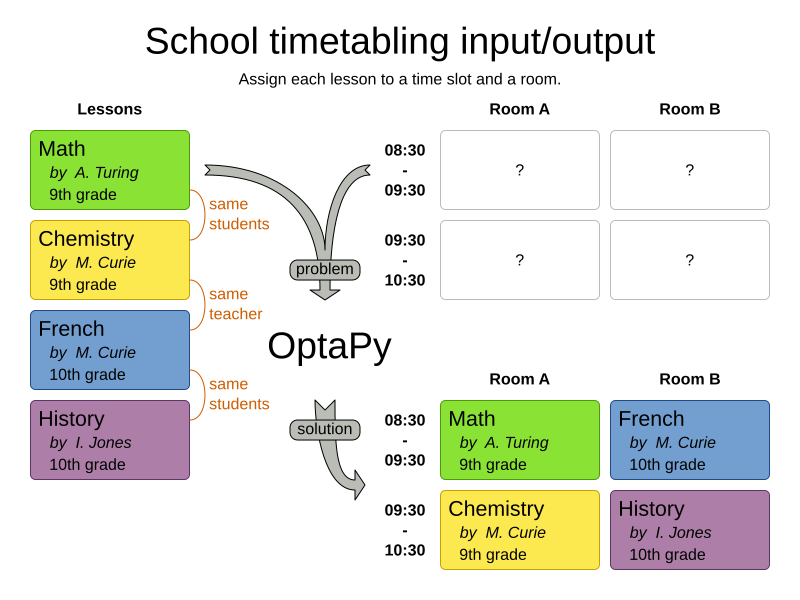
School timetabling
In school timetabling, we need to assign a list of lessons to timeslots and rooms. Additionally, there are some constraints:
-
A room can have at most one lesson at the same time.
-
A teacher can teach at most one lesson at the same time.
-
A student can attend at most one lesson at the same time.
-
A teacher prefers to teach all lessons in the same room.
-
A teacher prefers to teach sequential lessons and dislikes gaps between lessons.
-
A student dislikes sequential lessons on the same subject.
Modelling the domain
The Objects used in constraints are known as the domain of the problem. In school timetabling, the domain consist of lessons, rooms and timeslots.
Problem Facts
Problem facts do not change throughout solving. Rooms and timeslots are examples of problem facts. Create a domain.py file with the following code to create the Room class:
from optapy import problem_fact, planning_id
@problem_fact
class Room:
def __init__(self, id, name):
self.id = id
self.name = name
@planning_id
def get_id(self):
return self.id
def __str__(self):
return f"Room(id={self.id}, name={self.name})"The @problem_fact decorator registers the class as a problem fact, which allows it to be used in constraints.
The @planning_id decorator registers getId as the planning ID for Room. OptaPlanner requires a planning ID for some functionality, such as generating unique pairs. The planning ID should be unique for instances of the same class.
Now, in domain.py, let’s add the following code to create the Timeslot class:
@problem_fact
class Timeslot:
def __init__(self, id, day_of_week, start_time, end_time):
self.id = id
self.day_of_week = day_of_week
self.start_time = start_time
self.end_time = end_time
@planning_id
def get_id(self):
return self.id
def __str__(self):
return (
f"Timeslot("
f"id={self.id}, "
f"day_of_week={self.day_of_week}, "
f"start_time={self.start_time}, "
f"end_time={self.end_time})"
)Planning Entities
Planning entities change throughout solving. Lesson is a planning entity, since its room and
timeslot properties change throughout solving. Since the room and timeslot properties change throughout solving, they are known as planning variables. Let’s add the following code to domain.py to create the Lesson class.
from optapy import planning_entity, planning_variable
@planning_entity
class Lesson:
def __init__(self, id, subject, teacher, student_group, timeslot=None, room=None):
self.id = id
self.subject = subject
self.teacher = teacher
self.student_group = student_group
self.timeslot = timeslot
self.room = room
@planning_id
def get_id(self):
return self.id
@planning_variable(Timeslot, ["timeslotRange"])
def get_timeslot(self):
return self.timeslot
def set_timeslot(self, new_timeslot):
self.timeslot = new_timeslot
@planning_variable(Room, ["roomRange"])
def get_room(self):
return self.room
def set_room(self, new_room):
self.room = new_room
def __str__(self):
return (
f"Lesson("
f"id={self.id}, "
f"timeslot={self.timeslot}, "
f"room={self.room}, "
f"teacher={self.teacher}, "
f"subject={self.subject}, "
f"student_group={self.student_group}"
f")"
)The @planning_entity decorator registers the class as a planning entity, which allows OptaPlanner to assign its planning variables and for it to be used in constraints.
The @planning_variable(variable_type, [value_range_provider_refs…]) decorator registers a method as the getter of a planning variable.
The getter must be named get<X> and the setter must be named set<X>.
The first argument, variable_type, tells OptaPlanner what type of values OptaPlanner can assign to this planning variable.
The second argument, value_range_provider_refs, tells OptaPlanner what value ranges it takes its values from. We will explain value ranges later in this example.
Constraints
Constraints define the score calculation, or the fitness function, of a planning problem. Each solution of a planning problem is graded with a score. A score represents the quality of a specific solution. The higher the score the better. OptaPlanner looks for the best solution, which is the solution with the highest score found in the available time. It might or might not be the optimal solution.
Because this use case has hard and soft constraints, use the HardSoftScore class to represent the score:
-
Hard constraints must not be broken. For example: A room can have at most one lesson at the same time.
-
Soft constraints should not be broken. For example: A teacher prefers to teach in a single room.
Hard constraints are weighted against other hard constraints. Soft constraints are weighted too, against other soft constraints. Hard constraints always outweigh soft constraints, regardless of their respective weights.
To calculate the score, create a constraint provider function in the file constraints.py:
from domain import Lesson, Room
from optapy import constraint_provider, get_class
from optapy.constraint import Joiners
from optapy.score import HardSoftScore
# Constraint Factory takes Java Classes, not Python Classes
LessonClass = get_class(Lesson)
RoomClass = get_class(Room)
@constraint_provider
def define_constraints(constraint_factory):
return [
# Hard constraints
room_conflict(constraint_factory),
teacher_conflict(constraint_factory),
student_group_conflict(constraint_factory),
# Soft constraints are only implemented in the optapy-quickstarts code
]
def room_conflict(constraint_factory):
# A room can accommodate at most one lesson at the same time.
return constraint_factory \
.forEach(LessonClass) \
.join(LessonClass,
[
# ... in the same timeslot ...
Joiners.equal(lambda lesson: lesson.timeslot),
# ... in the same room ...
Joiners.equal(lambda lesson: lesson.room),
# ... and the pair is unique (different id, no reverse pairs) ...
Joiners.lessThan(lambda lesson: lesson.id)
]) \
.penalize("Room conflict", HardSoftScore.ONE_HARD)
def teacher_conflict(constraint_factory):
# A teacher can teach at most one lesson at the same time.
return constraint_factory \
.forEach(LessonClass)\
.join(LessonClass,
[
Joiners.equal(lambda lesson: lesson.timeslot),
Joiners.equal(lambda lesson: lesson.teacher),
Joiners.lessThan(lambda lesson: lesson.id)
]) \
.penalize("Teacher conflict", HardSoftScore.ONE_HARD)
def student_group_conflict(constraint_factory):
# A student can attend at most one lesson at the same time.
return constraint_factory \
.forEach(LessonClass) \
.join(LessonClass,
[
Joiners.equal(lambda lesson: lesson.timeslot),
Joiners.equal(lambda lesson: lesson.student_group),
Joiners.lessThan(lambda lesson: lesson.id)
]) \
.penalize("Student group conflict", HardSoftScore.ONE_HARD)The @constraint_provider decorator allows OptaPlanner to use a function as a constraint provider.
The function must take exactly one argument; the passed argument is a ConstraintFactory used for creating constraints.
For more information, see Constraint Streams in the OptaPlanner documentation.
Gather the domain objects in a planning solution
A TimeTable class wraps all Timeslot, Room, and Lesson instances of a single data set. Furthermore, because it contains all lessons, each with a specific planning variable state, the TimeTable class is a planning solution and has a score:
-
If lessons are still unassigned, then it is an uninitialized solution, for example, a solution with the score -4init/0hard/0soft.
-
If it breaks hard constraints, then it is an infeasible solution, for example, a solution with the score -2hard/-3soft.
-
If it adheres to all hard constraints, then it is a feasible solution, for example, a solution with the score 0hard/-7soft.
In domain.py, add the following code to create the TimeTable class:
from optapy import planning_solution, planning_entity_collection_property, \
problem_fact_collection_property, \
value_range_provider, planning_score
from optapy.score import HardSoftScore
def format_list(a_list):
return ',\n'.join(map(str, a_list))
@planning_solution
class TimeTable:
def __init__(self, timeslot_list, room_list, lesson_list, score=None):
self.timeslot_list = timeslot_list
self.room_list = room_list
self.lesson_list = lesson_list
self.score = score
@problem_fact_collection_property(Timeslot)
@value_range_provider("timeslotRange")
def get_timeslot_list(self):
return self.timeslot_list
@problem_fact_collection_property(Room)
@value_range_provider("roomRange")
def get_room_list(self):
return self.room_list
@planning_entity_collection_property(Lesson)
def get_lesson_list(self):
return self.lesson_list
@planning_score(HardSoftScore)
def get_score(self):
return self.score
def set_score(self, score):
self.score = score
def __str__(self):
return (
f"TimeTable("
f"timeslot_list={format_list(self.timeslot_list)},\n"
f"room_list={format_list(self.room_list)},\n"
f"lesson_list={format_list(self.lesson_list)},\n"
f"score={str(self.score.toString()) if self.score is not None else 'None'}"
f")"
)The @planning_solution decorator tells OptaPlanner that the class TimeTable holds the input and output data.
The @problem_fact_collection_property(fact_type) decorator tells OptaPlanner the function that provides problem facts.
The fact_type argument tells OptaPlanner what type of fact it provides (for instance, Rooms).
The @value_range_provider(range_id) decorator tells OptaPlanner the function that provides a value range, which is used to get possible values of planning variables.
Its argument, range_id is a string which is used in @planning_variable decorators to link the two (for example, @planning_variable(Room, ['roomRange']) is linked to @value_range_provider('roomRange').
The @planning_entity_collection_property(entity_type) decorator tells OptaPlanner the function that provides planning entities.
The entity_type argument tells OptaPlanner what type of entities it provides (for instance, Lessons).
The @planning_score(score_type) decorator tells OptaPlanner the function that returns the score.
It must be named get<X> and have a corresponding a setter set<X>.
The score_type argument tells OptaPlanner what type of score to use (for instance, HardSoftScore).
The type should be taken from the optapy.types module.
Solving
To solve, we first need to create an instance of our problem. Add the following code to domain.py:
from datetime import time
def generate_problem():
timeslot_list = [
Timeslot(1, "MONDAY", time(hour=8, minute=30), time(hour=9, minute=30)),
Timeslot(2, "MONDAY", time(hour=9, minute=30), time(hour=10, minute=30)),
Timeslot(3, "MONDAY", time(hour=10, minute=30), time(hour=11, minute=30)),
Timeslot(4, "MONDAY", time(hour=13, minute=30), time(hour=14, minute=30)),
Timeslot(5, "MONDAY", time(hour=14, minute=30), time(hour=15, minute=30)),
Timeslot(6, "TUESDAY", time(hour=8, minute=30), time(hour=9, minute=30)),
Timeslot(7, "TUESDAY", time(hour=9, minute=30), time(hour=10, minute=30)),
Timeslot(8, "TUESDAY", time(hour=10, minute=30), time(hour=11, minute=30)),
Timeslot(9, "TUESDAY", time(hour=13, minute=30), time(hour=14, minute=30)),
Timeslot(10, "TUESDAY", time(hour=14, minute=30), time(hour=15, minute=30)),
]
room_list = [
Room(1, "Room A"),
Room(2, "Room B"),
Room(3, "Room C")
]
lesson_list = [
Lesson(1, "Math", "A. Turing", "9th grade"),
Lesson(2, "Math", "A. Turing", "9th grade"),
Lesson(3, "Physics", "M. Curie", "9th grade"),
Lesson(4, "Chemistry", "M. Curie", "9th grade"),
Lesson(5, "Biology", "C. Darwin", "9th grade"),
Lesson(6, "History", "I. Jones", "9th grade"),
Lesson(7, "English", "I. Jones", "9th grade"),
Lesson(8, "English", "I. Jones", "9th grade"),
Lesson(9, "Spanish", "P. Cruz", "9th grade"),
Lesson(10, "Spanish", "P. Cruz", "9th grade"),
Lesson(11, "Math", "A. Turing", "10th grade"),
Lesson(12, "Math", "A. Turing", "10th grade"),
Lesson(13, "Math", "A. Turing", "10th grade"),
Lesson(14, "Physics", "M. Curie", "10th grade"),
Lesson(15, "Chemistry", "M. Curie", "10th grade"),
Lesson(16, "French", "M. Curie", "10th grade"),
Lesson(17, "Geography", "C. Darwin", "10th grade"),
Lesson(18, "History", "I. Jones", "10th grade"),
Lesson(19, "English", "P. Cruz", "10th grade"),
Lesson(20, "Spanish", "P. Cruz", "10th grade"),
]
lesson = lesson_list[0]
lesson.set_timeslot(timeslot_list[0])
lesson.set_room(room_list[0])
return TimeTable(timeslot_list, room_list, lesson_list)Next, we need to create a SolverConfig, which tells OptaPlanner about the problem and what strategies to employ. In main.py, add the following code:
from domain import Lesson, TimeTable, generate_problem
from constraints import define_constraints
from optapy import get_class
import optapy.config
from optapy.types import Duration
solver_config = optapy.config.solver.SolverConfig() \
.withEntityClasses(get_class(Lesson)) \
.withSolutionClass(get_class(TimeTable)) \
.withConstraintProviderClass(get_class(define_constraints)) \
.withTerminationSpentLimit(Duration.ofSeconds(30))For the SolverConfig above, we use the default strategies, use the model we defined above, and set it terminate after 30 seconds.
Finally, we pass the SolverConfig and the problem instance to the solve function, which returns the last best solution found. Add the following code to main.py:
from optapy import solver_factory_create
solution = solver_factory_create(solver_config)\
.buildSolver()\
.solve(generate_problem())
print(solution)The solution returned is a TimeTable instance
of the best solution found.
When the solution is formatted into a table, it should look similar to this:
|------------|------------|------------|------------|
| | Room A | Room B | Room C |
|------------|------------|------------|------------|
| MON 08:30: | | Math | History |
| | | A. Turing | I. Jones |
| | | 9th grade | 10th grade |
|------------|------------|------------|------------|
| MON 09:30: | | Math | History |
| | | A. Turing | I. Jones |
| | | 10th grade | 9th grade |
|------------|------------|------------|------------|
| MON 10:30: | | Math | English |
| | | A. Turing | I. Jones |
| | | 10th grade | 9th grade |
|------------|------------|------------|------------|
| MON 13:30: | Math | Spanish | |
| | A. Turing | P. Cruz | |
| | 10th grade | 9th grade | |
|------------|------------|------------|------------|
| MON 14:30: | Math | English | |
| | A. Turing | P. Cruz | |
| | 9th grade | 10th grade | |
|------------|------------|------------|------------|
| TUE 08:30: | Physics | Spanish | |
| | M. Curie | P. Cruz | |
| | 9th grade | 10th grade | |
|------------|------------|------------|------------|
| TUE 09:30: | Chemistry | | English |
| | M. Curie | | I. Jones |
| | 10th grade | | 9th grade |
|------------|------------|------------|------------|
| TUE 10:30: | Physics | Spanish | |
| | M. Curie | P. Cruz | |
| | 10th grade | 9th grade | |
|------------|------------|------------|------------|
| TUE 13:30: | French | | Biology |
| | M. Curie | | C. Darwin |
| | 10th grade | | 9th grade |
|------------|------------|------------|------------|
| TUE 14:30: | Chemistry | Geography | |
| | M. Curie | C. Darwin | |
| | 9th grade | 10th grade | |
|------------|------------|------------|------------|Run the application
To run the application, execute the main file.
python3 main.pyConclusion
With OptaPy, Python developers can now use OptaPlanner in plain Python code (no Java coding needed). The full example can be found in the OptaPy quickstarts.
 News feed
News feed







Comments
Visit our forum to comment